Track models and datasets
8 minute read
ビデオチュートリアルをご覧ください。
Artifacts について
Artifact は、ギリシャのアンフォラのように、 生成されたオブジェクト、つまりプロセスの出力です。 ML で最も重要な Artifact は、 データセット と モデル です。
そして、コロナドの十字架のように、これらの重要な Artifact は博物館に属します。 つまり、あなた、あなたの Team、そして ML コミュニティ全体がそれらから学ぶことができるように、カタログ化され、整理されるべきです。 結局のところ、トレーニングを追跡しない人は、それを繰り返す運命にあります。
Artifacts API を使用すると、次の図のように、W&B Run の出力として Artifact をログに記録したり、Artifact を Run への入力として使用したりできます。
ここでは、トレーニング run がデータセットを取り込み、モデルを生成します。
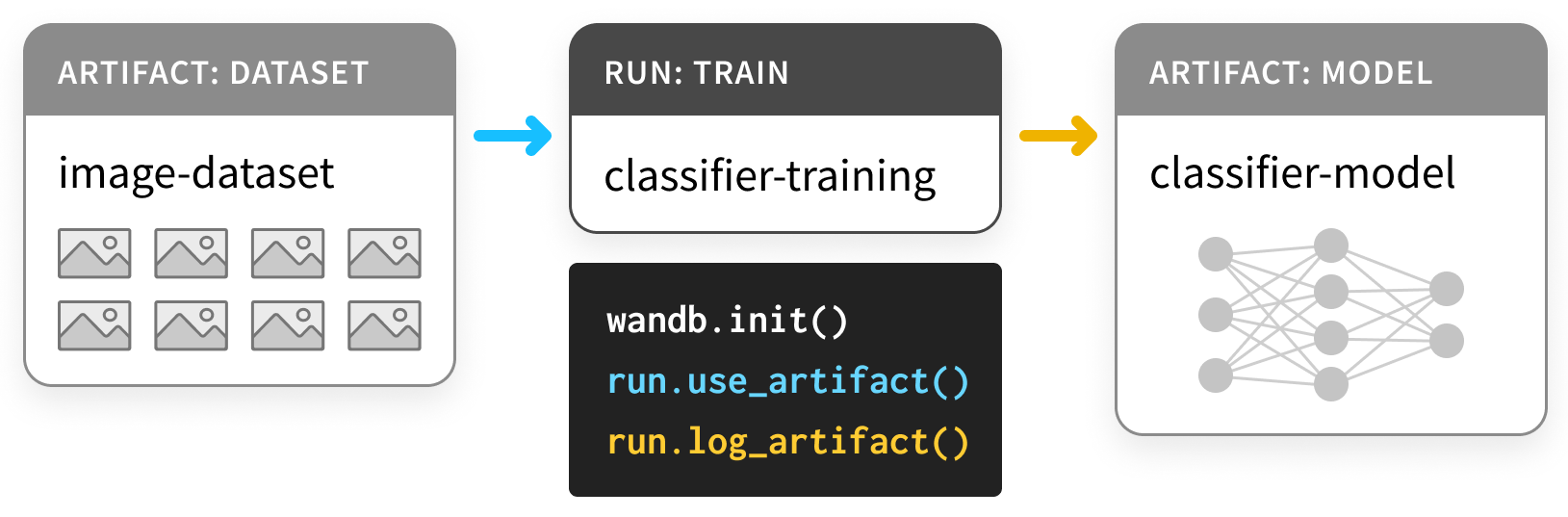
1 つの run が別の run の出力を入力として使用できるため、Artifact と Run はまとめて有向グラフ (2 部 DAG) を形成します。Artifact と Run のノードと、Run を消費または生成する Artifact に接続する矢印があります。
Artifacts を使用してモデルとデータセットを追跡する
インストールとインポート
Artifacts は、バージョン 0.9.2 以降の Python ライブラリの一部です。
ML Python スタックのほとんどの部分と同様に、pip 経由で利用できます。
# Compatible with wandb version 0.9.2+
!pip install wandb -qqq
!apt install tree
import os
import wandb
データセットのログ
まず、いくつかの Artifacts を定義しましょう。
この例は、この PyTorch “基本的な MNIST の例” に基づいています。 TensorFlowや他の framework、 または純粋な Python でも簡単に実行できます。
Dataset から始めましょう。
- パラメータを選択するための
trainニング セット - ハイパーパラメータを選択するための
validationセット - 最終モデルを評価するための
testニング セット
以下の最初のセルは、これら 3 つのデータセットを定義します。
import random
import torch
import torchvision
from torch.utils.data import TensorDataset
from tqdm.auto import tqdm
# Ensure deterministic behavior
torch.backends.cudnn.deterministic = True
random.seed(0)
torch.manual_seed(0)
torch.cuda.manual_seed_all(0)
# Device configuration
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
# Data parameters
num_classes = 10
input_shape = (1, 28, 28)
# drop slow mirror from list of MNIST mirrors
torchvision.datasets.MNIST.mirrors = [mirror for mirror in torchvision.datasets.MNIST.mirrors
if not mirror.startswith("http://yann.lecun.com")]
def load(train_size=50_000):
"""
# データのロード
"""
# the data, split between train and test sets
train = torchvision.datasets.MNIST("./", train=True, download=True)
test = torchvision.datasets.MNIST("./", train=False, download=True)
(x_train, y_train), (x_test, y_test) = (train.data, train.targets), (test.data, test.targets)
# split off a validation set for hyperparameter tuning
x_train, x_val = x_train[:train_size], x_train[train_size:]
y_train, y_val = y_train[:train_size], y_train[train_size:]
training_set = TensorDataset(x_train, y_train)
validation_set = TensorDataset(x_val, y_val)
test_set = TensorDataset(x_test, y_test)
datasets = [training_set, validation_set, test_set]
return datasets
これは、この例で繰り返されるパターンを設定します。
Artifact としてデータをログに記録するコードは、データの
生成コードの周りにラップされます。
この場合、データを load するコードは、
データを load_and_log するコードから分離されています。
これは良い習慣です。
これらのデータセットを Artifacts としてログに記録するには、 次の手順が必要です。
wandb.initでRunを作成し (L4)、- データセットの
Artifactを作成し (L10)、 - 関連する
fileを保存してログに記録します (L20、L23)。
以下のコードセルの例を確認し、後でセクションを展開して詳細を確認してください。
def load_and_log():
# 🚀 run を開始し、それにラベルを付ける type と、ホームと呼ぶことができる project を指定します
with wandb.init(project="artifacts-example", job_type="load-data") as run:
datasets = load() # データセットをロードするための個別のコード
names = ["training", "validation", "test"]
# 🏺 Artifact を作成
raw_data = wandb.Artifact(
"mnist-raw", type="dataset",
description="Raw MNIST dataset, split into train/val/test",
metadata={"source": "torchvision.datasets.MNIST",
"sizes": [len(dataset) for dataset in datasets]})
for name, data in zip(names, datasets):
# 🐣 Artifact に新しいファイルを保存し、そのコンテンツに何かを書き込みます。
with raw_data.new_file(name + ".pt", mode="wb") as file:
x, y = data.tensors
torch.save((x, y), file)
# ✍️ Artifact を W&B に保存します。
run.log_artifact(raw_data)
load_and_log()
wandb.init
Artifact を生成する Run を作成するときは、
どの project に属するかを明記する必要があります。
workflow によっては、
project は car-that-drives-itself ほど大きくても、
iterative-architecture-experiment-117 ほど小さくてもかまいません。
経験則: 可能であれば、
Artifactを共有するすべてのRunを 1 つの project 内に保持します。これにより、物事がシンプルになりますが、心配しないでください。Artifactは project 間で移植可能です。
実行する可能性のあるさまざまな種類のジョブをすべて追跡するために、
Run を作成するときに job_type を指定すると便利です。
これにより、Artifact のグラフがすっきりと整理されます。
経験則:
job_typeは記述的であり、パイプラインの 1 つのステップに対応する必要があります。ここでは、データのloadとデータのpreprocessを分離しています。
wandb.Artifact
何かを Artifact としてログに記録するには、最初に Artifact オブジェクトを作成する必要があります。
すべての Artifact には name があります。これは、最初の引数で設定されます。
経験則:
nameは記述的である必要がありますが、覚えやすく、入力しやすい必要があります。 ハイフンで区切られ、コード内の変数名に対応する名前を使用することをお勧めします。
また、type もあります。Run の job_type と同様に、
これは Run と Artifact のグラフを整理するために使用されます。
経験則:
typeはシンプルにする必要があります。mnist-data-YYYYMMDDよりもdatasetやmodelに近いものにします。
また、description といくつかの metadata を辞書として添付することもできます。
metadata は、JSON にシリアル化できる必要があります。
経験則:
metadataは可能な限り記述的にする必要があります。
artifact.new_file と run.log_artifact
Artifact オブジェクトを作成したら、それにファイルを追加する必要があります。
そのとおりです。ファイル です。
Artifact はディレクトリーのように構造化されており、
ファイルとサブディレクトリーがあります。
経験則: 可能な場合は常に、
Artifactの内容を複数のファイルに分割します。これは、スケーリングするときに役立ちます。
new_file メソッドを使用して、
ファイルを同時に書き込み、Artifact に添付します。
以下では、add_file メソッドを使用します。
これにより、これら 2 つのステップが分離されます。
すべてのファイルを追加したら、wandb.ai に log_artifact する必要があります。
出力に URL がいくつか表示されます。
Run ページの URL も含まれています。
これは、ログに記録された Artifact を含む、Run の結果を表示できる場所です。
以下では、Run ページの他のコンポーネントをより有効に活用する例をいくつか示します。
ログに記録されたデータセット Artifact の使用
博物館の Artifact とは異なり、W&B の Artifact は、
保存されるだけでなく、使用 されるように設計されています。
それがどのようなものかを見てみましょう。
以下のセルは、生のデータセットを受け取るパイプライン ステップを定義します
。これを使用して、preprocess されたデータセットを生成します。
normalize され、正しく整形されています。
wandb とやり取りするコードから、コードの重要な部分である preprocess を分割していることに再び注意してください。
def preprocess(dataset, normalize=True, expand_dims=True):
"""
## データの準備
"""
x, y = dataset.tensors
if normalize:
# Scale images to the [0, 1] range
x = x.type(torch.float32) / 255
if expand_dims:
# Make sure images have shape (1, 28, 28)
x = torch.unsqueeze(x, 1)
return TensorDataset(x, y)
次に、wandb.Artifact ロギングでこの preprocess ステップをインストルメント化するコードを示します。
以下の例では、Artifact を use していること、
これは新しいこと、
そしてそれを log していること、
これは最後のステップと同じであることに注意してください。
Artifact は、Run の入力と出力の両方です。
新しい job_type である preprocess-data を使用して、
これが前のジョブとは異なる種類のジョブであることを明確にします。
def preprocess_and_log(steps):
with wandb.init(project="artifacts-example", job_type="preprocess-data") as run:
processed_data = wandb.Artifact(
"mnist-preprocess", type="dataset",
description="Preprocessed MNIST dataset",
metadata=steps)
# ✔️ 使用する Artifact を宣言します
raw_data_artifact = run.use_artifact('mnist-raw:latest')
# 📥 必要に応じて、Artifact をダウンロードします
raw_dataset = raw_data_artifact.download()
for split in ["training", "validation", "test"]:
raw_split = read(raw_dataset, split)
processed_dataset = preprocess(raw_split, **steps)
with processed_data.new_file(split + ".pt", mode="wb") as file:
x, y = processed_dataset.tensors
torch.save((x, y), file)
run.log_artifact(processed_data)
def read(data_dir, split):
filename = split + ".pt"
x, y = torch.load(os.path.join(data_dir, filename))
return TensorDataset(x, y)
ここで注意すべきことの 1 つは、preprocessing の steps
が preprocessed_data とともに metadata として保存されることです。
実験を再現可能にしようとしている場合は、 多くの metadata をキャプチャすることをお勧めします。
また、データセットが「large artifact」であっても、
download ステップは 1 秒もかからずに完了します。
詳細については、以下の markdown セルを展開してください。
steps = {"normalize": True,
"expand_dims": True}
preprocess_and_log(steps)
run.use_artifact
これらの手順はより簡単です。コンシューマーは、Artifact の name と、もう少しだけ知る必要があります。
その「もう少し」とは、必要な Artifact の特定のバージョンの alias です。
デフォルトでは、最後にアップロードされたバージョンには latest というタグが付けられます。
それ以外の場合は、v0/v1 などを使用して古いバージョンを選択するか、best や jit-script などの独自のエイリアスを指定できます。
Docker Hub タグと同様に、
エイリアスは名前と : で区切られているため、
必要な Artifact は mnist-raw:latest です。
経験則: エイリアスは短く簡潔に保ちます。
Artifactが何らかのプロパティを満たすようにする場合は、latestやbestなどのカスタムaliasを使用します
artifact.download
ここで、download 呼び出しについて心配しているかもしれません。
別のコピーをダウンロードすると、メモリへの負担が 2 倍になるのではないでしょうか。
ご心配なく。実際に何かをダウンロードする前に、
適切なバージョンがローカルで利用可能かどうかを確認します。
これには、torrenting と git によるバージョン管理 の基盤となるのと同じテクノロジーであるハッシュが使用されます。
Artifact が作成されてログに記録されると、
作業ディレクトリー内の artifacts というフォルダー
がサブディレクトリーでいっぱいになり始めます。
これは、各 Artifact に 1 つずつです。
!tree artifacts でその内容を確認してください。
!tree artifacts
Artifacts ページ
Artifact をログに記録して使用したので、
Run ページの Artifacts タブを確認してみましょう。
wandb 出力の Run ページの URL に移動し、
左側のサイドバーから [Artifacts] タブを選択します
(これはデータベース アイコンが付いたもので、
3 つのホッケー パックが互いに積み重ねられているように見えます)。
[Input Artifacts] テーブルまたは
[Output Artifacts] テーブルのいずれかの行をクリックし、
次にタブ ([Overview]、[Metadata])
をチェックして、Artifact についてログに記録されたすべての内容を確認します。
特に [Graph View] が気に入っています。
デフォルトでは、Artifact の type
と Run の job_type
を 2 種類のノードとして持つグラフが表示され、
矢印は消費と生産を表します。
モデルのログ
これで、Artifact の API の仕組みを理解するのに十分ですが、
この例をパイプラインの最後まで見てみましょう
。Artifact が ML workflow をどのように改善できるかを確認できます。
この最初のセルは、PyTorch で DNN model を構築します。これは、非常に単純な ConvNet です。
最初に model を初期化するだけで、トレーニングは行いません。
そうすることで、他のすべてを一定に保ちながら、トレーニングを繰り返すことができます。
from math import floor
import torch.nn as nn
class ConvNet(nn.Module):
def __init__(self, hidden_layer_sizes=[32, 64],
kernel_sizes=[3],
activation="ReLU",
pool_sizes=[2],
dropout=0.5,
num_classes=num_classes,
input_shape=input_shape):
super(ConvNet, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(in_channels=input_shape[0], out_channels=hidden_layer_sizes[0], kernel_size=kernel_sizes[0]),
getattr(nn, activation)(),
nn.MaxPool2d(kernel_size=pool_sizes[0])
)
self.layer2 = nn.Sequential(
nn.Conv2d(in_channels=hidden_layer_sizes[0], out_channels=hidden_layer_sizes[-1], kernel_size=kernel_sizes[-1]),
getattr(nn, activation)(),
nn.MaxPool2d(kernel_size=pool_sizes[-1])
)
self.layer3 = nn.Sequential(
nn.Flatten(),
nn.Dropout(dropout)
)
fc_input_dims = floor((input_shape[1] - kernel_sizes[0] + 1) / pool_sizes[0]) # layer 1 output size
fc_input_dims = floor((fc_input_dims - kernel_sizes[-1] + 1) / pool_sizes[-1]) # layer 2 output size
fc_input_dims = fc_input_dims*fc_input_dims*hidden_layer_sizes[-1] # layer 3 output size
self.fc = nn.Linear(fc_input_dims, num_classes)
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.fc(x)
return x
ここでは、W&B を使用して run を追跡しているため、
wandb.config
オブジェクトを使用して、すべてのハイパーパラメータを格納します。
その config オブジェクトの dict ional バージョンは、非常に役立つ metadata であるため、必ず含めてください。
def build_model_and_log(config):
with wandb.init(project="artifacts-example", job_type="initialize", config=config) as run:
config = wandb.config
model = ConvNet(**config)
model_artifact = wandb.Artifact(
"convnet", type="model",
description="Simple AlexNet style CNN",
metadata=dict(config))
torch.save(model.state_dict(), "initialized_model.pth")
# ➕ Artifact にファイルを追加する別の方法
model_artifact.add_file("initialized_model.pth")
wandb.save("initialized_model.pth")
run.log_artifact(model_artifact)
model_config = {"hidden_layer_sizes": [32, 64],
"kernel_sizes": [3],
"activation": "ReLU",
"pool_sizes": [2],
"dropout": 0.5,
"num_classes": 10}
build_model_and_log(model_config)
artifact.add_file
データセットのログの例のように、
new_file を同時に書き込んで Artifact に追加する代わりに、
1 つのステップでファイルを作成することもできます
(ここでは、torch.save)
してから、別のステップで Artifact に add します。
経験則: 重複を防ぐために、可能な限り
new_fileを使用します。
ログに記録されたモデル Artifact の使用
dataset で use_artifact を呼び出すことができるのと同様に、
initialized_model で呼び出して、別の Run で使用することができます。
今回は、model を train してみましょう。
詳細については、次の Colab を参照してください。 W&B を PyTorch でインストルメント化する。
import torch.nn.functional as F
def train(model, train_loader, valid_loader, config):
optimizer = getattr(torch.optim, config.optimizer)(model.parameters())
model.train()
example_ct = 0
for epoch in range(config.epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output = model(data)
loss = F.cross_entropy(output, target)
loss.backward()
optimizer.step()
example_ct += len(data)
if batch_idx % config.batch_log_interval == 0:
print('Train Epoch: {} [{}/{} ({:.0%})]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
batch_idx / len(train_loader), loss.item()))
train_log(loss, example_ct, epoch)
# evaluate the model on the validation set at each epoch
loss, accuracy = test(model, valid_loader)
test_log(loss, accuracy, example_ct, epoch)
def test(model, test_loader):
model.eval()
test_loss = 0
correct = 0
with torch.no_grad():
for data, target in test_loader:
data, target = data.to(device), target.to(device)
output = model(data)
test_loss += F.cross_entropy(output, target, reduction='sum') # sum up batch loss
pred = output.argmax(dim=1, keepdim=True) # get the index of the max log-probability
correct += pred.eq(target.view_as(pred)).sum()
test_loss /= len(test_loader.dataset)
accuracy = 100. * correct / len(test_loader.dataset)
return test_loss, accuracy
def train_log(loss, example_ct, epoch):
loss = float(loss)
# where the magic happens
wandb.log({"epoch": epoch, "train/loss": loss}, step=example_ct)
print(f"Loss after " + str(example_ct).zfill(5) + f" examples: {loss:.3f}")
def test_log(loss, accuracy, example_ct, epoch):
loss = float(loss)
accuracy = float(accuracy)
# where the magic happens
wandb.log({"epoch": epoch, "validation/loss": loss, "validation/accuracy": accuracy}, step=example_ct)
print(f"Loss/accuracy after " + str(example_ct).zfill(5) + f" examples: {loss:.3f}/{accuracy:.3f}")
今回は、2 つの別々の Artifact を生成する Run を実行します。
最初の model の train ニングが終了すると、
second は trained-model Artifact
を消費して、test_dataset でそのパフォーマンスを evaluate します。
また、ネットワークが最も混乱する 32 個の例も取り出します。
これは、categorical_crossentropy が最も高い例です。
これは、データセットとモデルの問題を診断するのに適した方法です。
def evaluate(model, test_loader):
"""
## トレーニング済みのモデルの評価
"""
loss, accuracy = test(model, test_loader)
highest_losses, hardest_examples, true_labels, predictions = get_hardest_k_examples(model, test_loader.dataset)
return loss, accuracy, highest_losses, hardest_examples, true_labels, predictions
def get_hardest_k_examples(model, testing_set, k=32):
model.eval()
loader = DataLoader(testing_set, 1, shuffle=False)
# get the losses and predictions for each item in the dataset
losses = None
predictions = None
with torch.no_grad():
for data, target in loader:
data, target = data.to(device), target.to(device)
output = model(data)
loss = F.cross_entropy(output, target)
pred = output.argmax(dim=1, keepdim=True)
if losses is None:
losses = loss.view((1, 1))
predictions = pred
else:
losses = torch.cat((losses, loss.view((1, 1))), 0)
predictions = torch.cat((predictions, pred), 0)
argsort_loss = torch.argsort(losses, dim=0)
highest_k_losses = losses[argsort_loss[-k:]]
hardest_k_examples = testing_set[argsort_loss[-k:]][0]
true_labels = testing_set[argsort_loss[-k:]][1]
predicted_labels = predictions[argsort_loss[-k:]]
return highest_k_losses, hardest_k_examples, true_labels, predicted_labels
これらのロギング関数は新しい Artifact 機能を追加しないため、
コメントは付けません。
Artifact を use、download、
および log しているだけです。
from torch.utils.data import DataLoader
def train_and_log(config):
with wandb.init(project="artifacts-example", job_type="train", config=config) as run:
config = wandb.config
data = run.use_artifact('mnist-preprocess:latest')
data_dir = data.download()
training_dataset = read(data_dir, "training")
validation_dataset = read(data_dir, "validation")
train_loader = DataLoader(training_dataset, batch_size=config.batch_size)
validation_loader = DataLoader(validation_dataset, batch_size=config.batch_size)
model_artifact = run.use_artifact("convnet:latest")
model_dir = model_artifact.download()
model_path = os.path.join(model_dir, "initialized_model.pth")
model_config = model_artifact.metadata
config.update(model_config)
model = ConvNet(**model_config)
model.load_state_dict(torch.load(model_path))
model = model.to(device)
train(model, train_loader, validation_loader, config)
model_artifact = wandb.Artifact(
"trained-model", type="model",
description="Trained NN model",
metadata=dict(model_config))
torch.save(model.state_dict(), "trained_model.pth")
model_artifact.add_file("trained_model.pth")
wandb.save("trained_model.pth")
run.log_artifact(model_artifact)
return model
def evaluate_and_log(config=None):
with wandb.init(project="artifacts-example", job_type="report", config=config) as run:
data = run.use_artifact('mnist-preprocess:latest')
data_dir = data.download()
testing_set = read(data_dir, "test")
test_loader = torch.utils.data.DataLoader(testing_set, batch_size=128, shuffle=False)
model_artifact = run.use_artifact("trained-model:latest")
model_dir = model_artifact.download()
model_path = os.path.join(model_dir, "trained_model.pth")
model_config = model_artifact.metadata
model = ConvNet(**model_config)
model.load_state_dict(torch.load(model_path))
model.to(device)
loss, accuracy, highest_losses, hardest_examples, true_labels, preds = evaluate(model, test_loader)
run.summary.update({"loss": loss, "accuracy": accuracy})
wandb.log({"high-loss-examples":
[wandb.Image(hard_example, caption=str(int(pred)) + "," + str(int(label)))
for hard_example, pred, label in zip(hardest_examples, preds, true_labels)]})
train_config = {"batch_size": 128,
"epochs": 5,
"batch_log_interval": 25,
"optimizer": "Adam"}
model = train_and_log(train_config)
evaluate_and_log()
[i18n] feedback_title
[i18n] feedback_question
Glad to hear it! Please tell us how we can improve.
Sorry to hear that. Please tell us how we can improve.