Create and view lineage maps
less than a minute
W&B Registry内のコレクションでは、ML 実験で使用される Artifacts の履歴を表示できます。この履歴は リネージグラフ と呼ばれます。
コレクションの一部ではない、W&B に記録した Artifacts のリネージグラフも表示できます。
リネージグラフは、Artifacts を記録する特定の run を示すことができます。さらに、リネージグラフは、どの run が Artifacts を入力として使用したかを示すこともできます。言い換えれば、リネージグラフは run の入力と出力を示すことができます。
たとえば、以下の画像は、ML 実験全体で作成および使用された Artifacts を示しています。
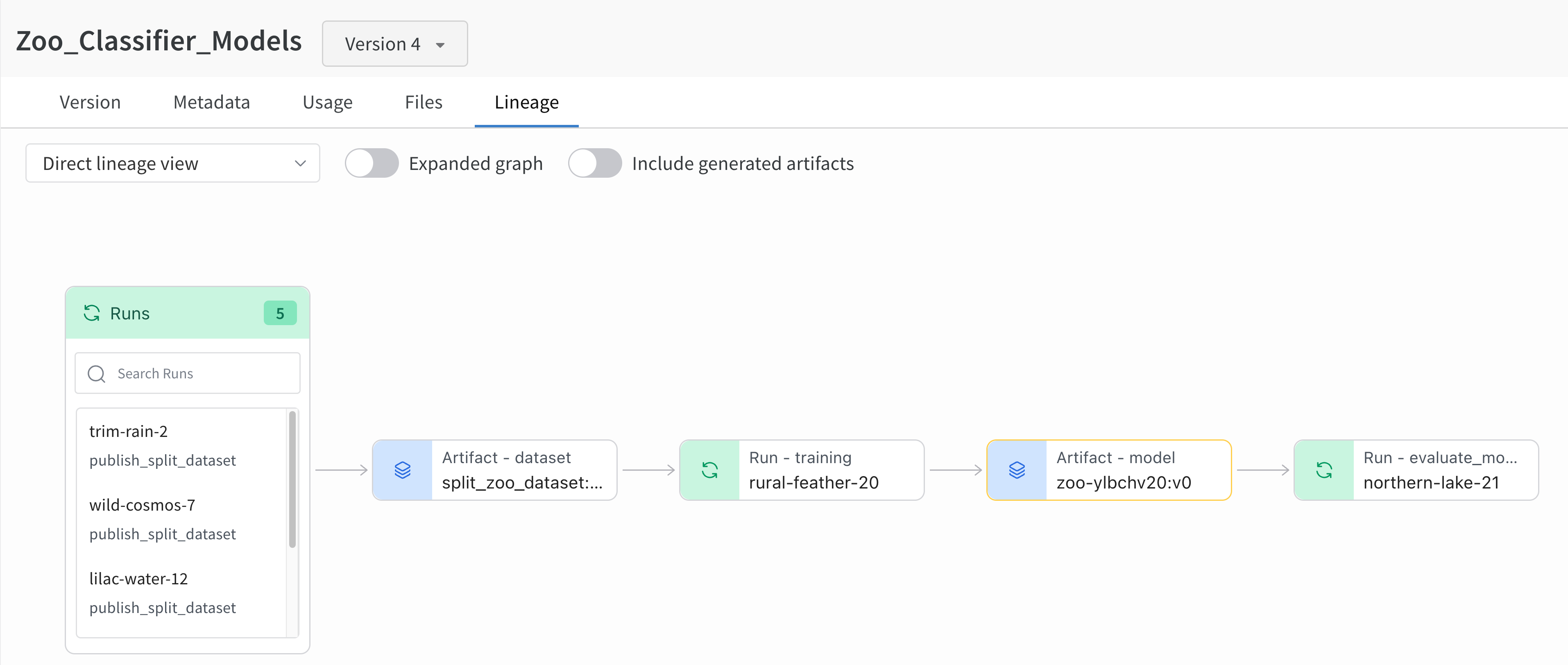
左から右へ、画像は以下を示しています。
- 複数の runs が
split_zoo_dataset:v4アーティファクトを記録します。 - “rural-feather-20” run は、トレーニングに
split_zoo_dataset:v4アーティファクトを使用します。 - “rural-feather-20” run の出力は、
zoo-ylbchv20:v0というモデルアーティファクトです。 - “northern-lake-21” という run は、モデルアーティファクト
zoo-ylbchv20:v0を使用してモデルを評価します。
run の入力を追跡する
wandb.init.use_artifact API を使用して、Artifacts を run の入力または依存関係としてマークします。
以下のコードスニペットは、use_artifact の使用方法を示しています。山括弧 (< >) で囲まれた値を自分の値に置き換えてください。
import wandb
# Initialize a run
run = wandb.init(project="<project>", entity="<entity>")
# Get artifact, mark it as a dependency
artifact = run.use_artifact(artifact_or_name="<name>", aliases="<alias>")
run の出力を追跡する
Artifacts を run の出力として宣言するには、(wandb.init.log_artifact) を使用します。
以下のコードスニペットは、wandb.init.log_artifact API の使用方法を示しています。山括弧 (< >) で囲まれた値を必ず自分の値に置き換えてください。
import wandb
# Initialize a run
run = wandb.init(entity "<entity>", project = "<project>",)
artifact = wandb.Artifact(name = "<artifact_name>", type = "<artifact_type>")
artifact.add_file(local_path = "<local_filepath>", name="<optional-name>")
# Log the artifact as an output of the run
run.log_artifact(artifact_or_path = artifact)
Artifacts の作成に関する詳細については、Artifacts の作成 を参照してください。
コレクションでリネージグラフを表示する
W&B Registry でコレクションにリンクされた Artifacts のリネージを表示します。
- W&B Registry に移動します。
- Artifacts を含むコレクションを選択します。
- ドロップダウンから、リネージグラフを表示する Artifacts のバージョンをクリックします。
- 「リネージ」タブを選択します。
Artifacts のリネージグラフページにアクセスすると、そのリネージグラフ内の任意のノードに関する追加情報を表示できます。
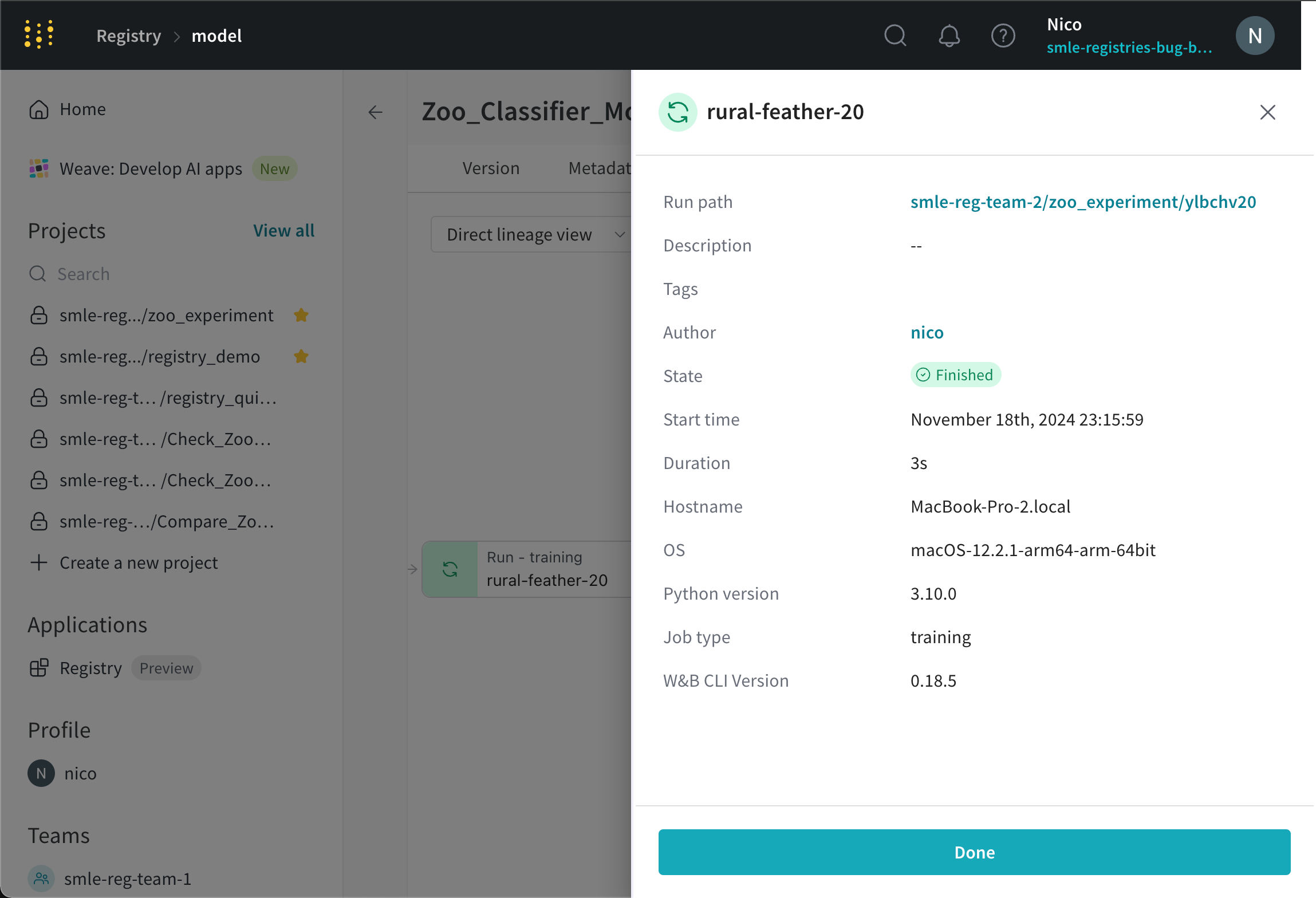
run の ID、run の名前、run の状態など、その run の詳細を表示するには、run ノードを選択します。例として、以下の画像は rural-feather-20 run に関する情報を示しています。
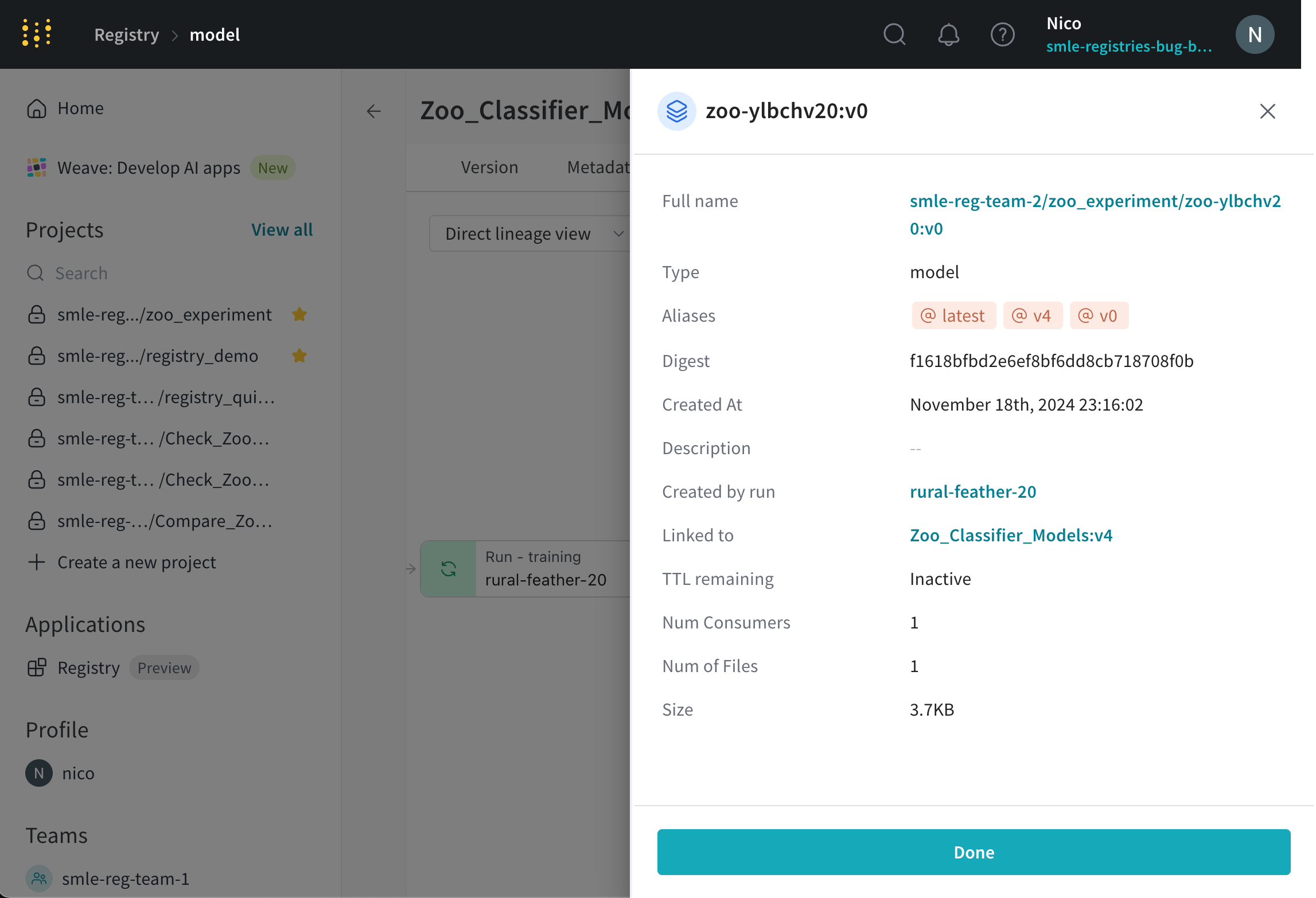
Artifacts のフルネーム、タイプ、作成時間、および関連するエイリアスなど、その Artifacts の詳細を表示するには、Artifacts ノードを選択します。
[i18n] feedback_title
[i18n] feedback_question
Glad to hear it! Please tell us how we can improve.
Sorry to hear that. Please tell us how we can improve.